ELCGZ16

- 公称尺寸(mm):
- 16mm
- 产品概述
- 型号说明
- 文件下载
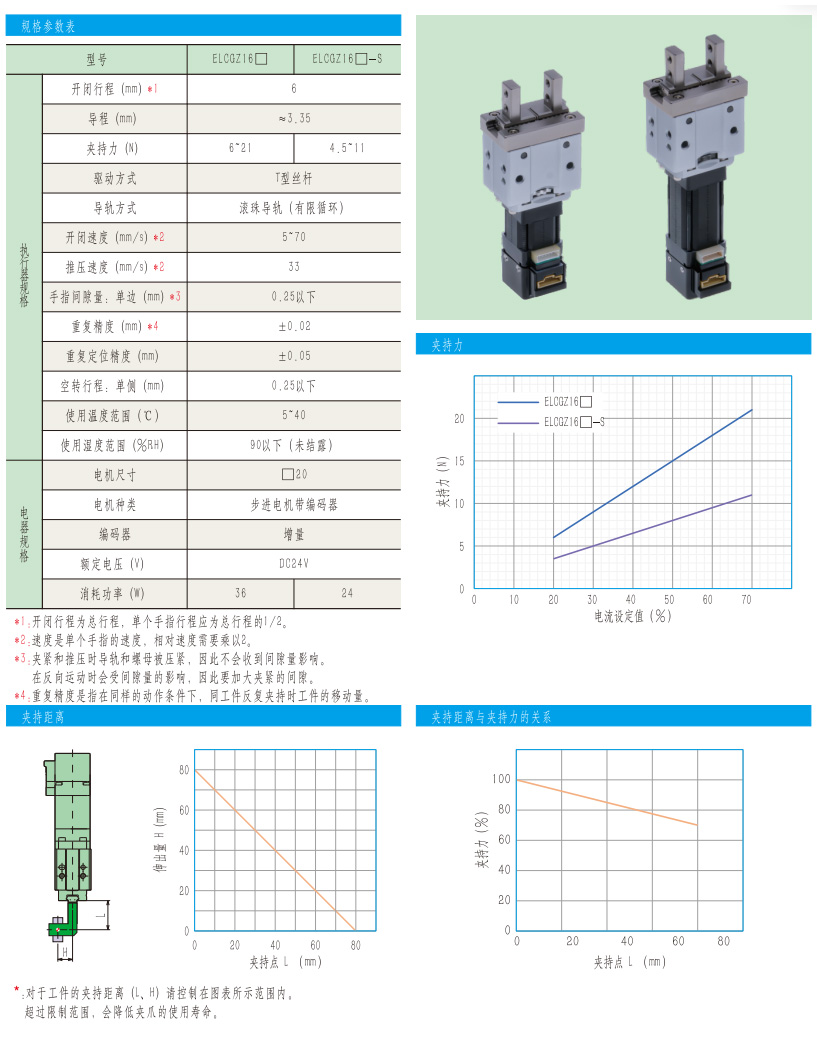
电动夹爪是一种特殊的夹爪,手臂较长,可以实现对物品的抓取。在机器人定点工作的时候,电动夹爪可以利用它较长的手臂有效延长工作范围。
注意事项:
1.安装电爪时,请使用合适长度的螺丝,在MAX紧固力矩以下进行紧固。超过MAX紧固力矩值,会造成电爪动作不良,紧固不足时,会造成电爪偏移或掉落,请注意!
2.夹持工件时请使用推压动作。
3.夹持点距离请在限制范围内使用。超过限制范围,夹爪部分将将会承受过大的力矩负载,会降低夹爪的使用寿命。
4.确认夹持力时,请选择有一定裕量的型号。
5.选型时,请选择对于工件宽度有裕量的型号。没有裕量的场合,电爪会因开闭宽度及工件的大小偏差而引起夹持的不稳定。
6.电爪开合和运动时,确保不会撞击外部工件。开合动作中的手指不得受横向负载或冲击负载,以防止手指松动或破损。由于进给螺杆螺纹咬合而造成动作不良。
7.电爪不能在有过大的外力(含振动)以及冲击力的场合使用。过大的外力和冲击力会导致电爪动作不良,请注意!
8.不通电情况下要将工件卸除,请使用手动拨轮进行开闭。当需要使用手动拨轮进行操作的时,请先确认电爪的手动拨轮位置,确保足够的操作空间。另外请不要对手动拨轮施加过大的力矩,以免引起破损或动作不良。在电爪移动的行程末端时,工件和附件不要碰上其他物体,应留有间隙。
9.关于原点回归:原点回归方向请与工件夹持方向相同。回原方向相反时会因间隙量的原因产生位移偏差。
10.夹持动作时的位置设定:
①夹持的起始位置请与夹持的工件留有0.5mm以上的间隙,如果设定与工件相同宽度的情况下,夹持动作(推压模式)可能会产生报警,请注意!
②设定的夹持距离应小于工件的宽度,如果设定与工件相同宽度的情况下可能会引起工件的掉落,内撑的情况则反之,请注意!
11.工件件夹持的时候,不要把负载集中在一个手指上。
12.在手指上安装夹具时,请勿对手指施加过大的转矩。过大的转矩会降低手指组件的精度。
13.夹持解除时的动作扭矩按请加大动作扭矩。如果解除扭矩过小,有时会无法解除夹持。